Abbe Error
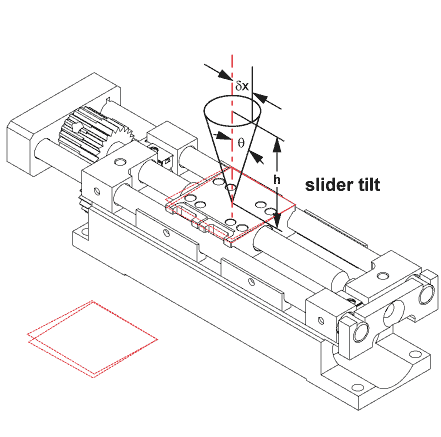
Abbe Error - Abbe Error is the linear off-axis error introduced through the amplification of tilt by an Abbe offset moment arm (depicted as h in the figure at right). This type of error increases with distance from the axis of motion. For example, the Abbe error is approximately 0.01 µm of error based on a 10mm moment arm and a tilt of 1µradian.
Accuracy
Accuracy - Accuracy is the departure of the actual position from the commanded position (although, more precisely, it is the inaccuracy). Accuracy may be expressed per unit distance of travel or over the full travel of the stage.
For example, a linear stage may be specified as having an accuracy of 3 micrometers per inch of travel. This specification is sometimes considered the "linearity."
Axes
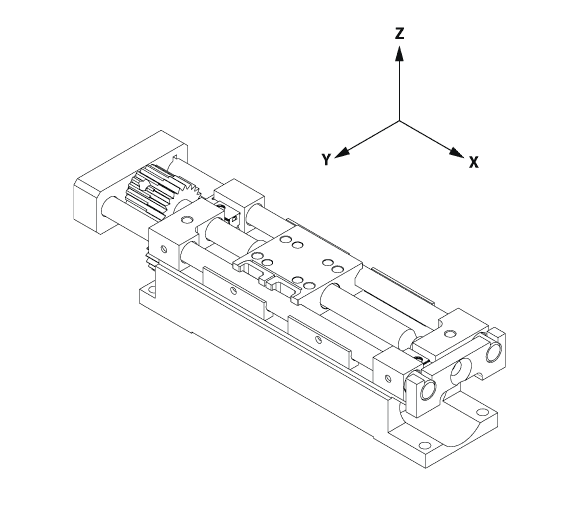
Axes - The convention used for NAI stages is the travel (longitudinal) axis is X, the cross-travel (lateral) axis is Y, and the vertical axis is Z as shown in figure at right.
Axial thrust
Axial thrust - For a rotary stage, the axial thrust refers to the hold-down strength of the rotor or the force required to release the rotor from its kinematic footing.
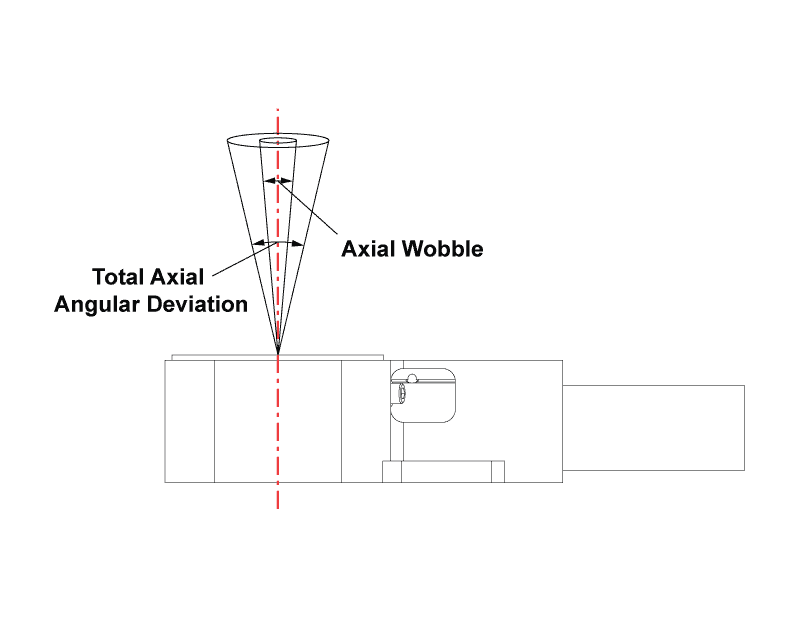
Axial Wobble
Axial wobble - For a rotary stage,
axial wobble is the repeatable component of total
axial angular deviation resulting from machining
tolerances on mating surfaces.
Backlash
Backlash - Backlash in an error in positioning experienced upon reversal of travel direction. Backlash is the portion of commanded motion that produces no change in position upon reversal of travel direction and is caused by clearance between elements in the drive train and mechanical deformation. Backlash also affects bidirectional repeatability. NAI manual stages do not exhibit measurable backlash because they are spring preloaded.
Direct Top Load
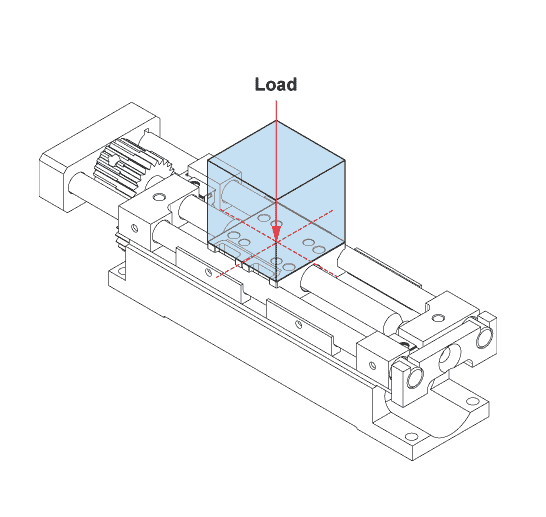
Direct Top Load - Direct top load is the maximum downward vertical load or force which can be applied to a stage slider perpendicular to the mounting surface (without deformation or associated motion error). If the force or center of gravity of the load is located off-center of the mounting surface, there will be an additional moment load (refer to moments).
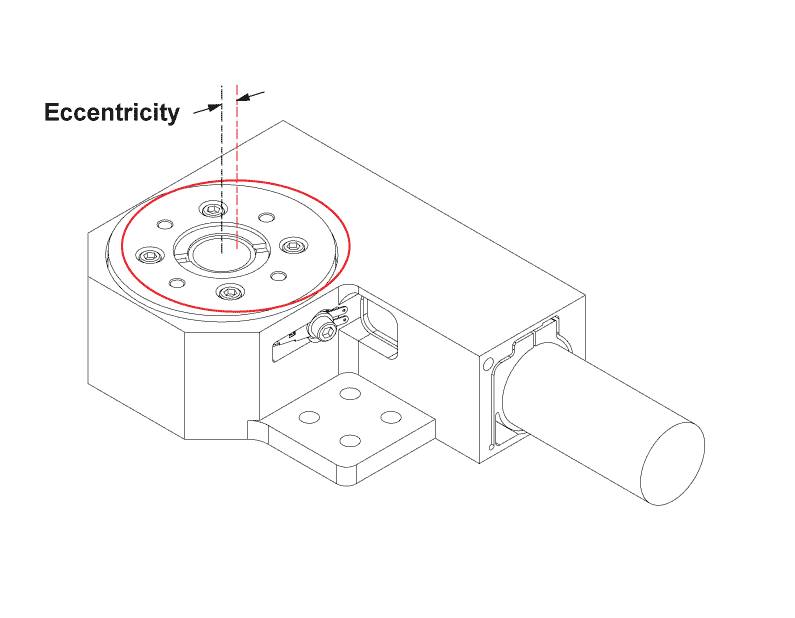
Eccentricity
Eccentricity - This is the radial (perpendicular to the axis of rotation) deviation of the center of rotation (lateral shift of the center of rotation) from its mean position as a stage rotates through one revolution.
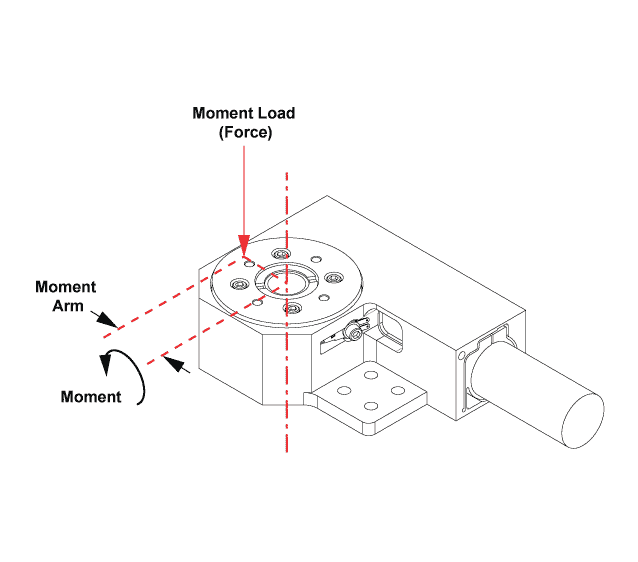
Moment Load
Moment Load - Moment load is the maximum torque sustainable (without deformation or associated motion error) when a force is applied to a rotary table parallel to the rotation axis of a rotary table. The load therefore is applied at a moment arm (distance) from the table center of rotation. The torque moment is computed as the product of the applied load and the moment arm.
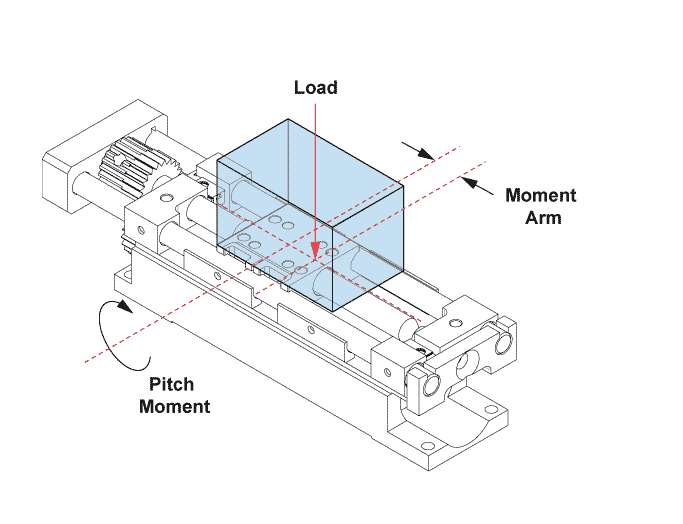
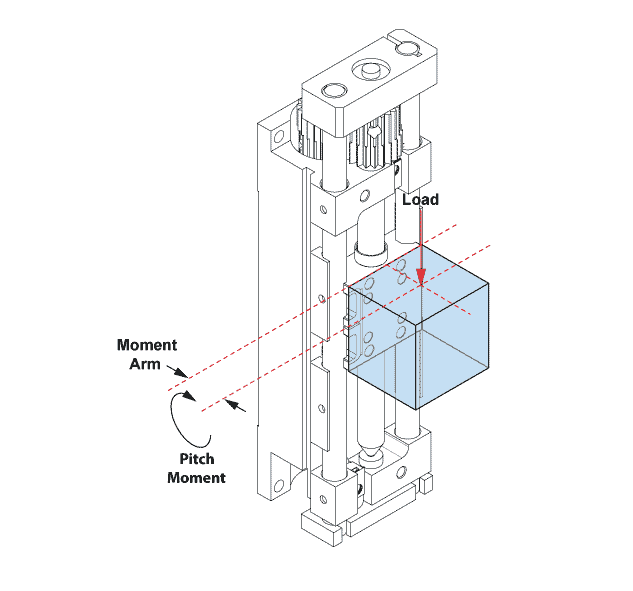
Pitch (moment) Load
Pitch (moment) Load - Pitch load is the maximum torque sustainable when the force or center of gravity of a vertically applied load is longitudinally offset from the center of the slider mounting surface (without deformation or associated motion error). The load therefore is applied at a longitudinal moment arm (distance) from the center of the mounting surface. The pitch moment is computed as the product of the applied load and the longitudinal moment arm.
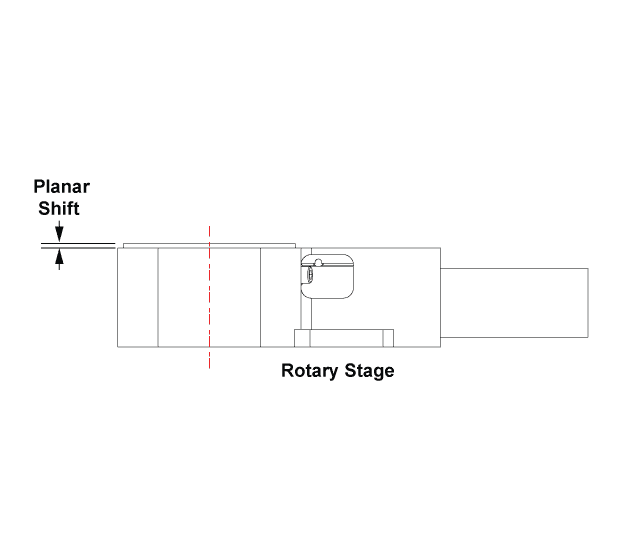
Planar Shift
Planar Shift - For a rotary stage table, planar shift is the maximum out of plane excursion of the table during rotation. This shift is partially correlated with wobble, but a component is due to local variation in table motion.
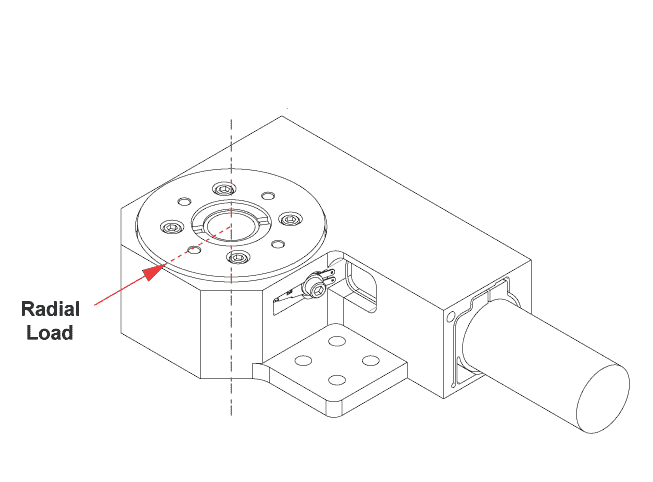
Radial Load
Radial Load - Radial load is the maximum force sustainable (without deformation or associated motion error) when the force is applied radially to a rotary table.
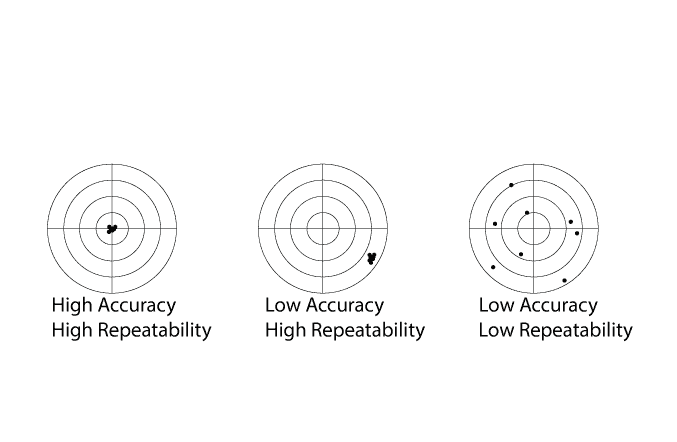
Repeatability
Repeatability - Repeatability represents the maximum difference between actual position values and commanded values, obtained in repetitive moves of a positioning stage to the commanded position. There are two types of repeatability: unidirectional and bidirectional. They are not the same as accuracy. Thus, a system may be very repeatable yet lack in accuracy. The distinction between accuracy and repeatability is illustrated in the figure at right.
Return Force
Return Force - Return force refers to manual stage preload spring force. It exhibits a maximum value at full compression and a minimum value at full extension positions of the slider. When a manual stage is mounted with the travel axis oriented vertically, these extreme values indicate what loads will remove the preload. The values correspond to the thumbscrew below the slider with the spring at full compression and the thumbscrew above the slider with the spring at full extension.
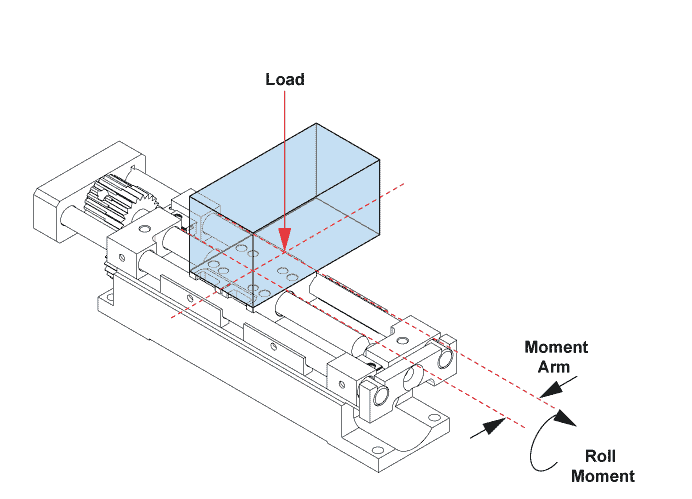
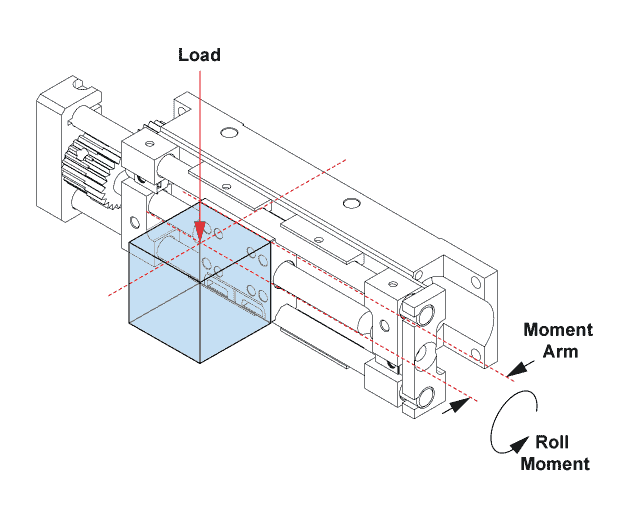
Roll (moment) Load
Roll (moment) Load - Roll load is the maximum torque sustainable (without deformation or associated motion error) when the force or center of gravity of a vertically applied load is laterally off-set from the center of the slider mounting surface. The load therefore is applied at a lateral moment arm (distance) from the center of the mounting surface. The roll moment is computed as the product of the applied load the lateral moment arm.
Rotor Stall Torque
Rotor stall torque - The rotor stall torque corresponds to the stall (zero velocity) torque of the drive motor, modified by the gear ratios of the specific drive train connecting the motor to the rotor.
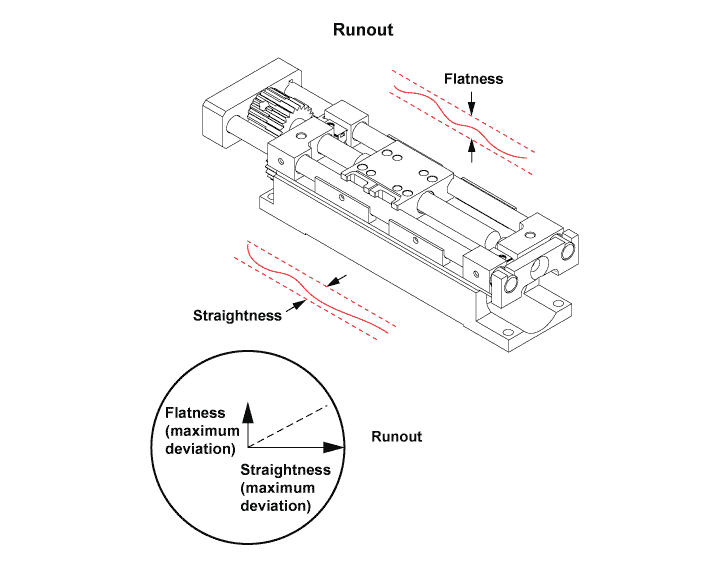
Runout
Runout - Runout pertains to the linear (as opposed to angular) portion of off-axis error present during slider translation. It is the maximum departure from desired, ideal straight line motion and consists of two orthogonal components, flatness and straightness. Runout is specified as the larger of the maxima of these two components.
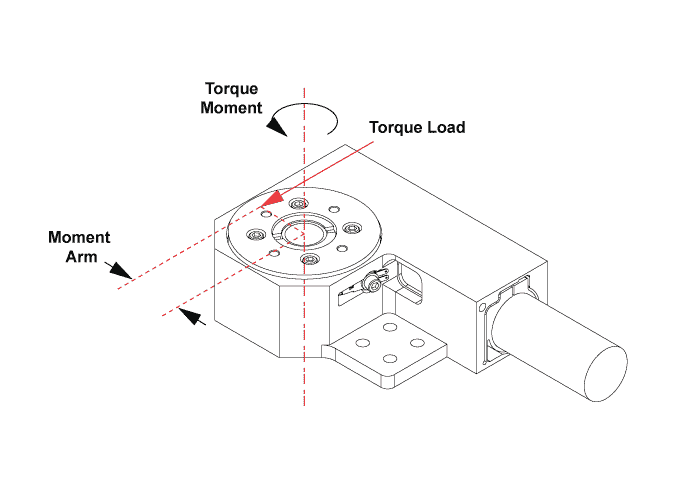
Torque Load
Torque load - Torque load is the maximum torque sustainable (without deformation or associated motion error) when a force is applied tangentially to a rotary table (perpendicular to a radial from the center of rotation of a rotary table). The load therefore is applied at a moment arm (distance) from the table center of rotation. The torque moment is computed as the product of the applied load and the moment arm.
Total Axial Angular Deviation
Total axial angular deviation - In addition to axial wobble, this includes non-repeatable (stochastic) axial deviation due to relative bearing motion and other mechanical contributions in the drive mechanism.
Vacuum Compatibility
"Vacuum compatibility" - This refers to the ability of selected products to operate at 10-6 Torr pressure. This is achieved by selection of device materials and lubrication means that exhibit limited outgassing behavior.
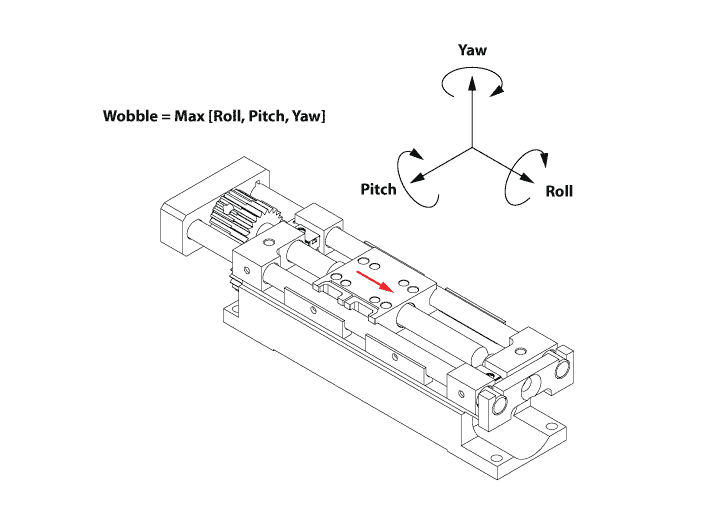
Wobble (linear stage)
Wobble (linear stage) - In the context of a linear stage, this refers to the larger of the maxima of slider roll, pitch, and yaw encountered during slider translation.
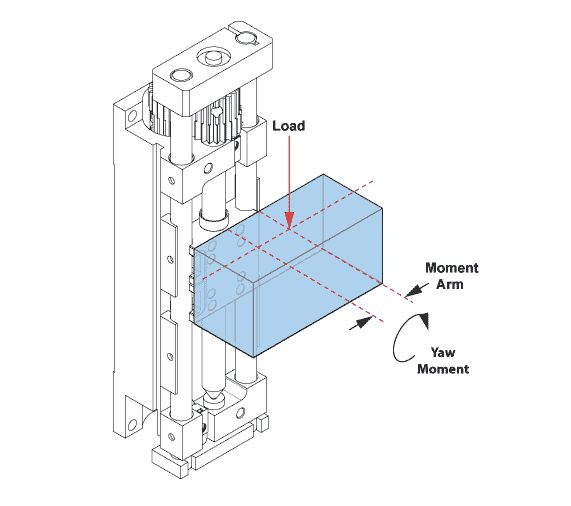
Yaw (moment) Load
Yaw (moment) Load - Yaw load is the maximum torque sustainable (without deformation or associated motion error) when the force or center of gravity of a laterally applied load is longitudinally offset from the center of the slider mounting surface. The load therefore is applied at a longitudinal moment arm (distance) from the center of the mounting surface. The yaw moment is computed as the product of the applied load and the longitudinal moment arm.